




WIRobotics, a global robotics company (Co-CEOs: YounBaek Lee and Yong-Jae Kim), recently announced the launch of its technology disclosure roadmap for building a Physical AI development ecosystem.
WIRobotics plans to gradually release the core technologies developed throughout its humanoid robot program to researchers and developers. As the first technology release, the company has unveiled the simulation model of its humanoid robot, ALLEX, together with the results of its Sim-to-Real (Simulation-to-Real) validation.
Across the global robotics industry, Physical AI—which enables robots to perceive, reason, and act in the physical world—is gaining attention as one of the next-generation core technologies. In particular, development approaches based on simulation environments that accurately reflect the characteristics of real robots are rapidly expanding in the humanoid robotics field.
In response to this trend, WIRobotics plans to go beyond robot development by building an open development ecosystem where external researchers and developers can actively participate. The goal is to provide an environment in which a wide range of algorithms and AI models can be researched and validated through simulation, even before physical robots become commercially available.
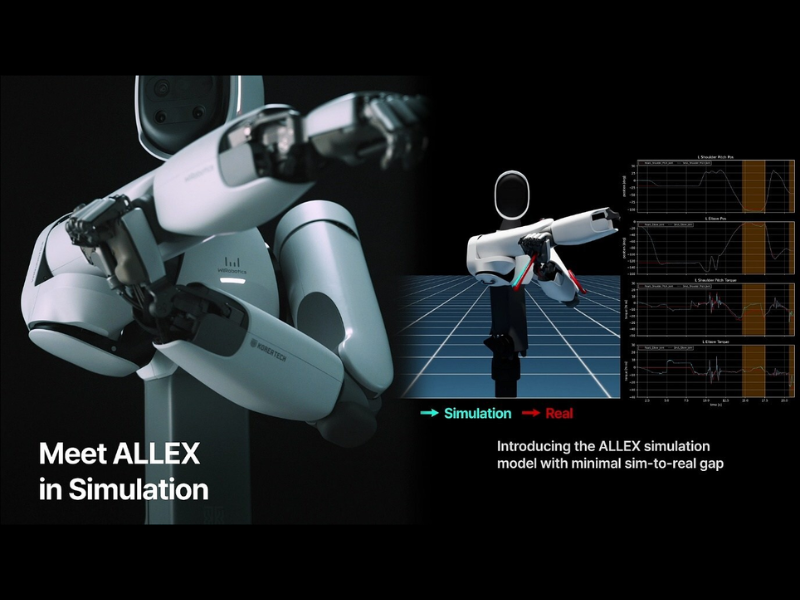
The newly released ALLEX simulation model focuses on minimizing the Sim-to-Real Gap between the simulation environment and the physical robot. In particular, the model precisely reproduces the characteristics of the real ALLEX, including its high backdrivability and force transparency. This demonstrates the robot’s highly differentiated Real-to-Sim characteristics, where the behavior of the physical robot closely matches that of the ideal simulation model. As a result, researchers and developers can conduct ALLEX-based robot control, learning, and synthetic data generation research without requiring access to physical hardware. The released model is available in MJCF format for MuJoCo, USD format for Isaac Sim, and URDF format for ROS.
This release marks the first step in WIRobotics’ Physical AI technology disclosure roadmap. The company plans to continue releasing additional core technologies developed throughout its humanoid robot program, further expanding the Physical AI development ecosystem.
Meanwhile, WIRobotics has also released a technical demonstration video through its official YouTube channel, showcasing the validation of consistency between the real robot and the simulation environment. The video provides a closer look at the technical implementation and the validation process.
Yong-Jae Kim, Co-CEO of WIRobotics, said: “In humanoid robot development, simulation models are a core infrastructure that serves as the foundation for learning, validation, and synthetic data generation. A simulation environment that effectively reflects the characteristics of the real robot enables developers to validate algorithms more quickly and increases the potential for successful deployment on physical hardware.”
He added: “We plan to make the ALLEX research platform available later this year. By releasing the ALLEX simulation model, we hope more developers will begin ALLEX-based research even before the hardware becomes widely available. We will continue expanding a development ecosystem where research outcomes can ultimately be applied to real robots.”
For more similar news, check links below:
HONOR Advances Its AI Vision at MWC 2026 with Robot Phone, Humanoid Robot and Magic V6
AiMOGA Robotics Launches Humanoid Robot to Autonomously Open Car Doors
KEENON Robotics unveils Humanoid Robot XMAN-R1 and the Latest KLEENBOT Additions











")




